研究開発グループのエンジニアの酒井 (@neko_suki)です。
aptpod Advent Calendar 2020 の1日目を担当します。
今回の記事では、ROSに対応している3つのオープンソースの自動運転シミュレータと弊社製品のintdashを連携させて、自動運転シミュレータの画像やセンサー情報をウェブブラウザ上で可視化してみました。
自動運転シミュレータは、「LGSVL」、「CARLA」、「AirSim」の3つを試してみました。
まずはそれぞれのシミュレータとintdashを連携させた動画をご覧ください。
動画では左に自動運転シミュレータ、右側にウェブブラウザ上で可視化を行う弊社製品の「Visual M2M Data Visualizer」を配置しています。
intdash LGSVL連携
youtu.be
intdash CARLA連携
youtu.be
intdash AirSim連携
youtu.be
動画上では撮影のために自動運転シミュレータとウェブブラウザを単一のPCで実行しています。
実際には、以下の図のように可視化しているセンサー情報や画像はクラウドを経由してウェブブラウザに届いています。
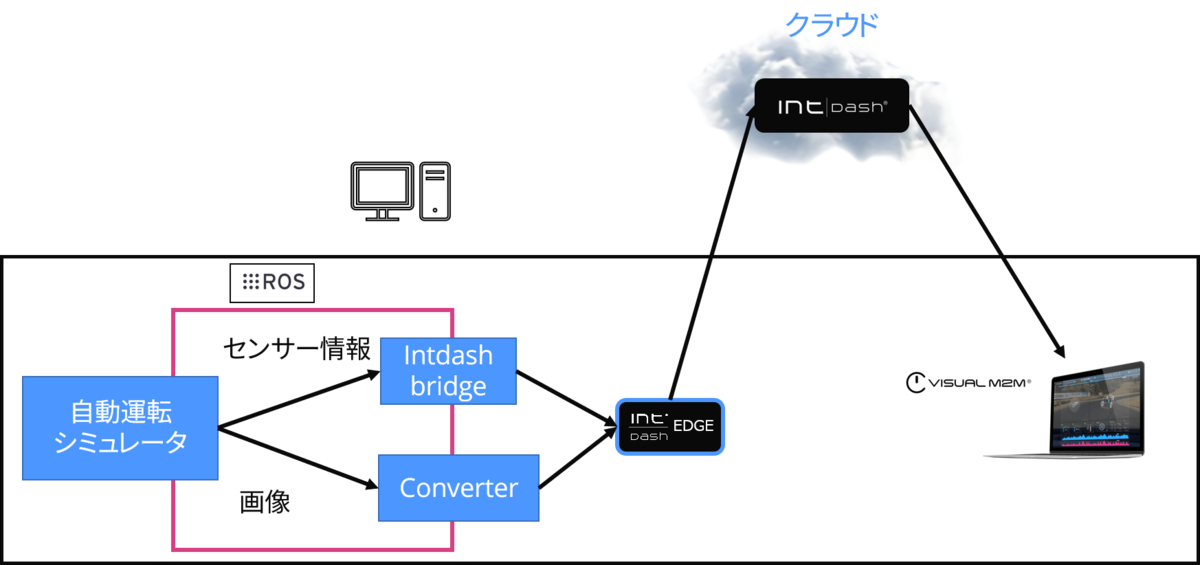
自動運転シミュレータ上の映像とウェブブラウザ上の映像を比較すると、クラウドを経由していますが大きな遅延がないことが確認できると思います。
このように、弊社の製品群を活用することで、ROSに対応した様々な自動運転シミュレータとの連携が実現できます。
ちなみに、今回は可視化を行っていますが、intdashを使うとクラウドにデータを保存することも可能です。保存されたデータをダウンロードして解析するなどの活用も可能です。
ここからはintdashとそれぞれの自動運転シミュレータをどのように連携させたかについて触れたいと思います。
- intdashとROSの連携
- LGSVLとROSの連携
- CARLAとの連携
- AirSimとの接続
- まとめ
続きを読む