
aptpod Advent Calendar 2021の3日目を担当しますOTチームの大久保です。
今年はRustのエッジ製品への適用がはじまり、RustでLinuxのシステムコールを呼ぶような処理を実装するような場面が増えました。今回はその一例として、Linux上でキー入力カスタマイズをするコードをRustで実装してみます。ついでに、debパッケージにしてUbuntuにインストール、systemdのサービスとして立ち上げるまで行います。
続きを読む
aptpod Advent Calendar 2021の3日目を担当しますOTチームの大久保です。
今年はRustのエッジ製品への適用がはじまり、RustでLinuxのシステムコールを呼ぶような処理を実装するような場面が増えました。今回はその一例として、Linux上でキー入力カスタマイズをするコードをRustで実装してみます。ついでに、debパッケージにしてUbuntuにインストール、systemdのサービスとして立ち上げるまで行います。
続きを読む
aptpod Advent Calendar 2021 2日目の記事を担当する、コーポレート・マーケティング室、デザインチームの「チェン ・ルイ」と申します。普段は社内製品のアプリケーションのUIデザイン業務を行なっています。
現在、aptpodでは自社Webアプリケーションのデザインガイドラインを整理しております。 これまであったaptpodのWebアプリケーションにおける課題と、それに対処するためにデザインガイドラインの作成において意識したポイントについてご紹介します。
続きを読む
aptpod Advent Calendar 2021 1日目の記事です。
みなさまお久しぶりです。アプトポッドで人事をしている神前(こうさき)と申します。
前回の記事からおよそ1年半ぶりの執筆、かつAdvent Calendarの一発目を担当することになり、またもや戦慄することになったのですが宜しくお願いいたします。

さてどんなテーマで書こうかなと考えていたのですが、ちょうど3年前のAdvent Calenderに人事マネージャーの小沢が書いた組織振り返りの記事がありましたので、これを引き継ぐ形でいまのアプトポッドを数字で色々みてみることにしました。

こんにちは。Visual M2M Data Visualizer Team の白金です。
弊社の製品の intdashでは、H.264形式の動画データを収集/計測できます。計測した動画データは、Fragmented MP4 のフォーマットを使用したライブ動画をストリーミング再生したり、計測した動画を後から確認するためにHLSのフォーマットで再生する機能があります。
今回は、ライブ動画の再生機能を改善するための施策として 先日 Google Chrome の Version 94 でリリースされた WebCodecs の機能に含まれる VideoDecoder を使用して、H.264 のライブ動画をストリーミングで再生を試してみたのでご紹介します。

Protocol/Robotics Teamの酒井 (@neko_suki) です。
以前「ROS2メッセージの遠隔リアルタイムデータ伝送を実現する新プロダクトのご紹介」という記事で開発中の intdash_ros2bridge というプロダクトを紹介しました。
今回は、前回記載したとおり、技術にフォーカスして技術的な詳細を含めた進捗をご紹介します。
intdash_ros2bridgeは、ROS2上で「任意のトピック、サービス、アクションのC++実装によるブリッジ」を実現します。ブリッジとは、ROS2空間の内部のデータからインターネット経由で伝送できるメッセージ形式への橋渡しをする処理のことを指します。
intdash_ros2bridgeによって遠隔地のROS2空間をつなぐことが可能になります。その結果ROS1と同様にROS2でも遠隔制御やモニタリングなどが実現できます。
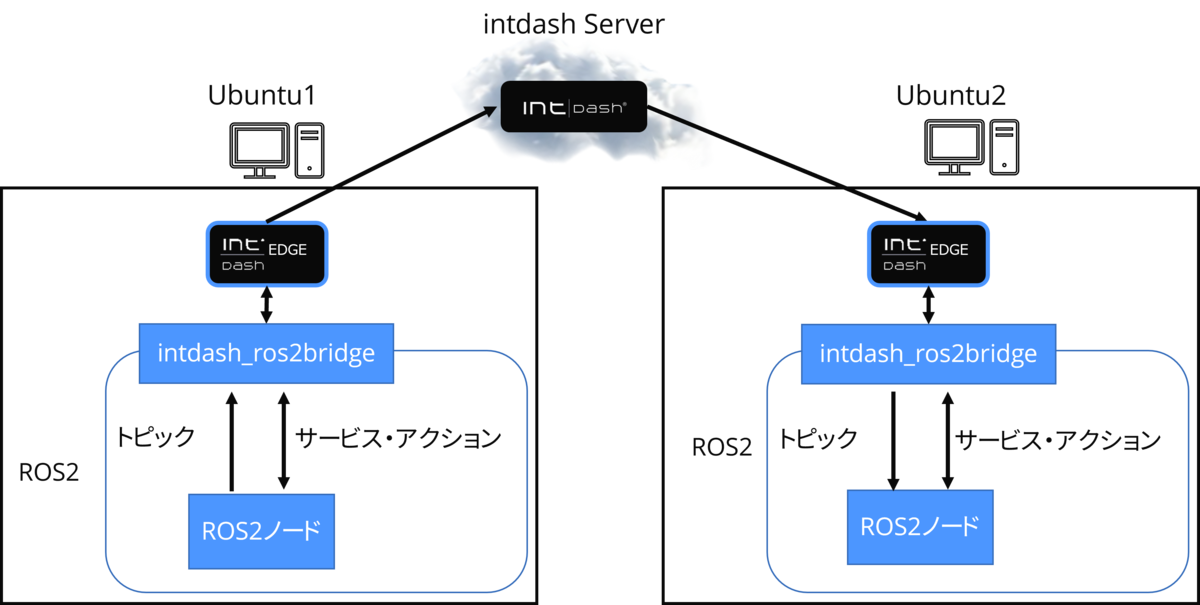
intdash_ros2bridgeではROSメッセージの伝送のために以下の2つの方法でブリッジを行います。
今回の記事では、最初にトピック、サービス、アクションをブリッジする方法について簡単に紹介します。次に、トピックをブリッジする方法、トピックをJSONに変換して伝送する方法の2点を詳細に掘り下げて説明します。