研究開発グループの酒井 (@neko_suki)です。
今回は、「Turtlebot3の実機を使ったSLAMとNavigationをAWS RoboMaker上でやってみた」という取り組みについて紹介します。
SLAMは、Simultaneous Localization and Mappingの略で、ロボットによる自己位置推定と地図作成を同時に行うことです。Navigationは、指定した目的地までロボットを移動させることです。
まずは、動画をご覧ください。
動画ではAWS RoboMakerのシミュレーションジョブ上で、Turtlebot3のNavigationを行うためのノードを起動します。 そして、シミュレーション上のrvizで目的地を設定します。 そうすると、Turtlebot3が自律走行していることが確認できます。
今回の記事では、この動作をどのように実現したのかをお伝えします。
なお、本内容は、ROS Japan UG #37 オンラインROS勉強会 で発表した内容をベースに執筆しております。 資料は SlideShare にアップロードしてあります。
取り組みのモチベーション
過去に弊社製品のintdash Edge と AWS RoboMaker を用いた遠隔制御の取り組みについてご紹介しました。
参考
現在でも研究開発グループでは、AWS RoboMakerとの連携による弊社製品のユースケースの拡充を検討しています。
今回の取り組みではその一環として、SLAMやNavigationのような負荷の高い処理をAWS RoboMaker上で実行するための検証を行いました。
従来は、SLAMやNavigationなどの処理はローカルネットワーク上で、Turtlebot3の実機と接続したPC上で実行していました。
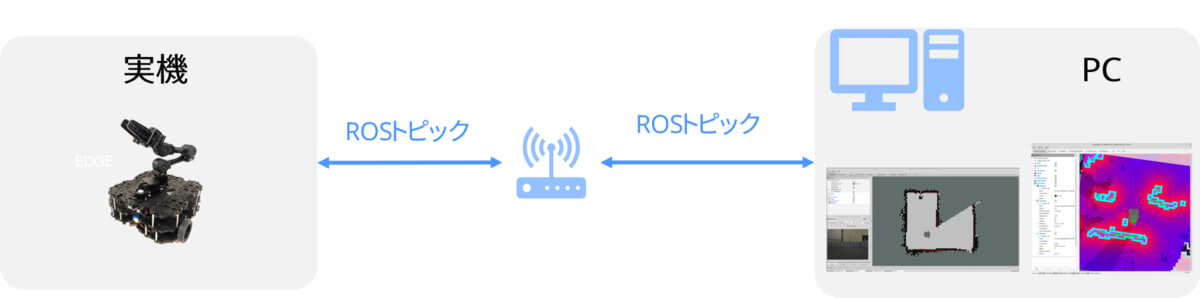
今回の取り組みでは、このPC上で行っていた処理をAWS RoboMaker上で行えるようにします。
弊社製品のintdash Edge は ROSトピックをインターネット経由で流すことが出来ます。なので、SLAMやNavigationに必要なROSトピックをTurtlebot3の実機からAWS RoboMaker上に流したり、逆にAWS RoboMaker上で発行されたNavigation用のROSトピックをTurtlebot3の実機に流すことも可能になります。
AWS RoboMakerのシミュレーションジョブではrvizをサポートしています。AWS RoboMakerのシミュレーションジョブは、Gazeboを用いた物理シミュレーションやROS bagの再生などのシミュレーションに用いるものですが、今回は(ハック的に)シミュレーションジョブを活用することで、rvizを用いたSLAMの可視化やrvizを用いたNavigationを実現しています。
最終的には以下の構成で検証を行いました。

技術的に検討をしたポイント
今回の取り組みを実現するために、技術的に以下の2点について検証をしました。
①インターネット経由でSLAM/Navigationを動かすために必要なROSトピックを調べる
②AWS RoboMaker上でSLAM/Navigationを動かす。
それぞれについて説明します。
①インターネット経由でSLAM/Navigationを動かすために必要なROSトピックを調べる
まず、SLAMやNavigationを動かすためにどのようなROSトピックが使われているかを確認します。
SLAM に必要なROSトピックの確認
SLAMはturtlebot3_manipulation_slam を使用しました。デフォルトでは、turtelbot3_slam_gmapping が起動されます。
以下のコマンドで起動します。
TURTLEBOT3_MODEL=waffle_pi roslaunch turtlebot3_manipulation_slam slam.launch
起動に成功すると下のような画面が表示されます。
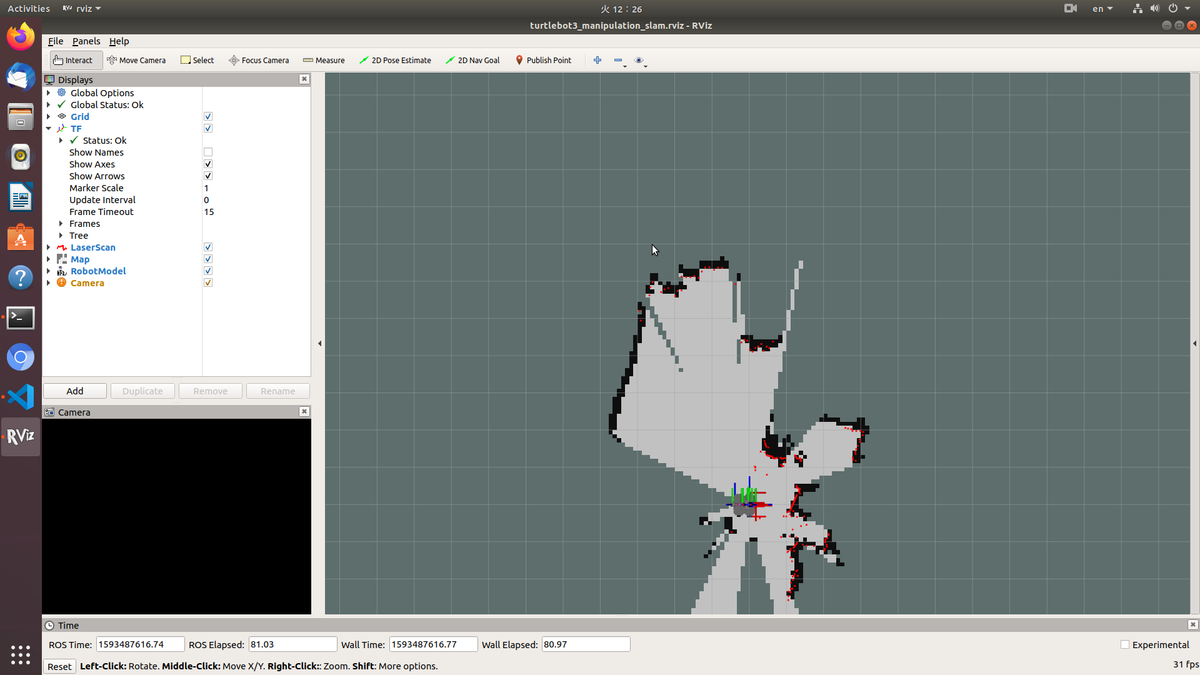
turtlebot3_slam_gmapping がpublish/subscribeしているROSトピックの一覧
rosnode info で、turtlebot3_slam_gmapping が使用している=subscribeしているROSトピックを調べます。
$ rosnode info /turtlebot3_slam_gmapping -------------------------------------------------------------------------------- Node [/turtlebot3_slam_gmapping] Publications: * /map [nav_msgs/OccupancyGrid] * /map_metadata [nav_msgs/MapMetaData] * /rosout [rosgraph_msgs/Log] * /tf [tf2_msgs/TFMessage] * /turtlebot3_slam_gmapping/entropy [std_msgs/Float64] Subscriptions: * /scan [sensor_msgs/LaserScan] * /tf [tf2_msgs/TFMessage] * /tf_static [tf2_msgs/TFMessage] (以下略)
ここから、turtlebot3_slam_gmapping を動かすためには、実機側で発行されている/scan、/tf、/tf_static が必要ということがわかります。
ただし、試してみた限りでは/tf_static は必要ありませんでした。
Navigationに必要なROSトピックの確認
Navigationには、turtlebot3_manipulation_navigation を使用しました。
以下のコマンドで起動します。
$ TURTLEBOT3_MODEL=waffle_pi roslaunch turtlebot3_manipulation_navigation navigation.launch map_file:=/tmp/my_map.yaml open_rviz:=false
起動に成功すると下のような画面が表示されます。

Navigationに使用されているROSトピックの一覧
ここでは、amcl と move_base という2つのノードについて調べました。
$ rosnode info amcl -------------------------------------------------------------------------------- Node [/amcl] Publications: * /amcl_pose [geometry_msgs/PoseWithCovarianceStamped] * /diagnostics [diagnostic_msgs/DiagnosticArray] * /particlecloud [geometry_msgs/PoseArray] * /rosout [rosgraph_msgs/Log] * /tf [tf2_msgs/TFMessage] Subscriptions: * /initialpose [unknown type] * /scan [sensor_msgs/LaserScan] * /tf [tf2_msgs/TFMessage] * /tf_static [tf2_msgs/TFMessage] (以下略)
$ rosnode info move_base -------------------------------------------------------------------------------- Node [/move_base] Publications: * /cmd_vel [geometry_msgs/Twist] * /move_base/DWAPlannerROS/cost_cloud [sensor_msgs/PointCloud2] * /move_base/DWAPlannerROS/global_plan [nav_msgs/Path] * /move_base/DWAPlannerROS/local_plan [nav_msgs/Path] * /move_base/DWAPlannerROS/parameter_descriptions [dynamic_reconfigure/ConfigDescription] * /move_base/DWAPlannerROS/parameter_updates [dynamic_reconfigure/Config] * /move_base/DWAPlannerROS/trajectory_cloud [sensor_msgs/PointCloud2] * /move_base/NavfnROS/plan [nav_msgs/Path] * /move_base/current_goal [geometry_msgs/PoseStamped] * /move_base/feedback [move_base_msgs/MoveBaseActionFeedback] * /move_base/global_costmap/costmap [nav_msgs/OccupancyGrid] * /move_base/global_costmap/costmap_updates [map_msgs/OccupancyGridUpdate] * /move_base/global_costmap/footprint [geometry_msgs/PolygonStamped] * /move_base/global_costmap/inflation_layer/parameter_descriptions [dynamic_reconfigure/ConfigDescription] * /move_base/global_costmap/inflation_layer/parameter_updates [dynamic_reconfigure/Config] * /move_base/global_costmap/obstacle_layer/parameter_descriptions [dynamic_reconfigure/ConfigDescription] * /move_base/global_costmap/obstacle_layer/parameter_updates [dynamic_reconfigure/Config] * /move_base/global_costmap/parameter_descriptions [dynamic_reconfigure/ConfigDescription] * /move_base/global_costmap/parameter_updates [dynamic_reconfigure/Config] * /move_base/global_costmap/static_layer/parameter_descriptions [dynamic_reconfigure/ConfigDescription] * /move_base/global_costmap/static_layer/parameter_updates [dynamic_reconfigure/Config] * /move_base/goal [move_base_msgs/MoveBaseActionGoal] * /move_base/local_costmap/costmap [nav_msgs/OccupancyGrid] * /move_base/local_costmap/costmap_updates [map_msgs/OccupancyGridUpdate] * /move_base/local_costmap/footprint [geometry_msgs/PolygonStamped] * /move_base/local_costmap/inflation_layer/parameter_descriptions [dynamic_reconfigure/ConfigDescription] * /move_base/local_costmap/inflation_layer/parameter_updates [dynamic_reconfigure/Config] * /move_base/local_costmap/obstacle_layer/parameter_descriptions [dynamic_reconfigure/ConfigDescription] * /move_base/local_costmap/obstacle_layer/parameter_updates [dynamic_reconfigure/Config] * /move_base/local_costmap/parameter_descriptions [dynamic_reconfigure/ConfigDescription] * /move_base/local_costmap/parameter_updates [dynamic_reconfigure/Config] * /move_base/parameter_descriptions [dynamic_reconfigure/ConfigDescription] * /move_base/parameter_updates [dynamic_reconfigure/Config] * /move_base/result [move_base_msgs/MoveBaseActionResult] * /move_base/status [actionlib_msgs/GoalStatusArray] * /rosout [rosgraph_msgs/Log] Subscriptions: * /clock [rosgraph_msgs/Clock] * /map [nav_msgs/OccupancyGrid] * /move_base/cancel [unknown type] * /move_base/global_costmap/footprint [geometry_msgs/PolygonStamped] * /move_base/goal [move_base_msgs/MoveBaseActionGoal] * /move_base/local_costmap/footprint [geometry_msgs/PolygonStamped] * /move_base_simple/goal [geometry_msgs/PoseStamped] * /odom [nav_msgs/Odometry] * /scan [sensor_msgs/LaserScan] * /tf [tf2_msgs/TFMessage] * /tf_static [tf2_msgs/TFMessage] (以下略)
これらの情報を精査した結果、SLAMで使用していたROSトピックに加えて、/odom が必要ということがわかりました。
また、インターネット経由でTurtlebot3の実機を制御するためには、move_base ノードがpublishした/cmd_vel を実機に届ける必要があることがわかります。
これらの情報から、AWS RoboMakerから弊社intdashサーバー経由でSLAM/Navigationを行うには、Turtlebot3実機とシミュレーションジョブで以下のように設定すればよいことがわかりました。
- Turtlebot3は、
/scan、/tf、/odomをintdashサーバーにアップロードし、/cmd_velをダウンロードする。 - AWS RoboMaker側のシミュレーションジョブは、
/scan、/tf、/odomをintdashサーバーからダウンロードし、/cmd_velをアップロードする。
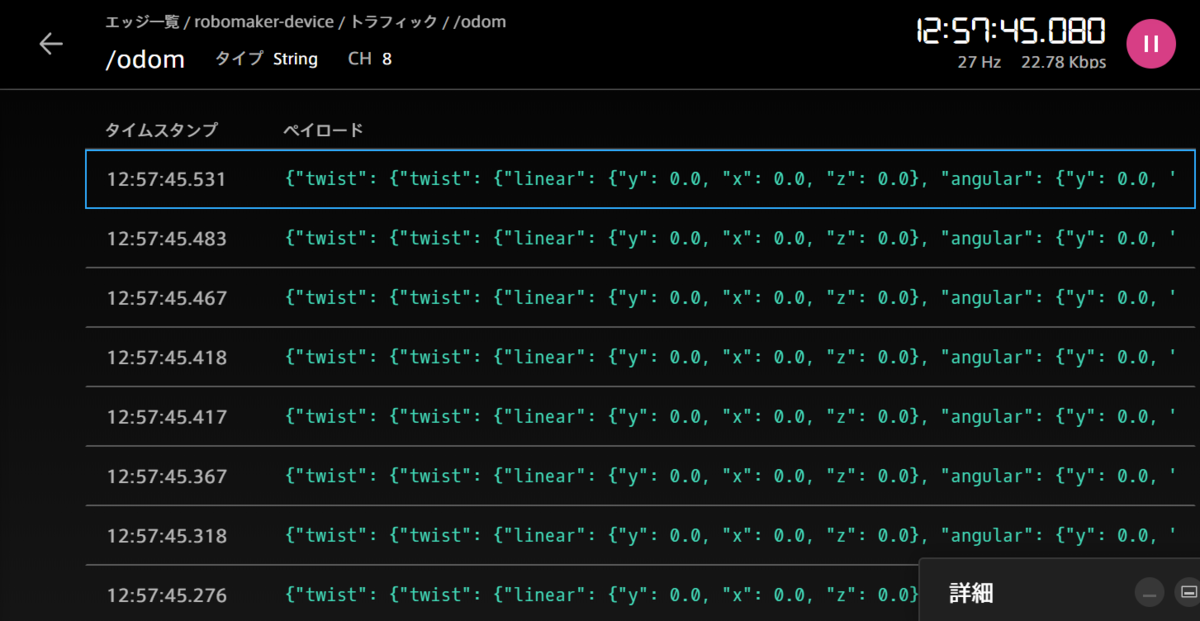
帯域の計測
インターネットを経由する場合、どのくらいの帯域が必要になるか気になると思います。
弊社の製品には流れているデータの流量を計測できるものがあるので、それを用いてROSトピックの帯域を計測しました。
結果は以下のようになります。
/scan: 約40Kbps

/tf: 約74Kbps

/odom: 約23Kbps
/cmd_vel : 約1kbps
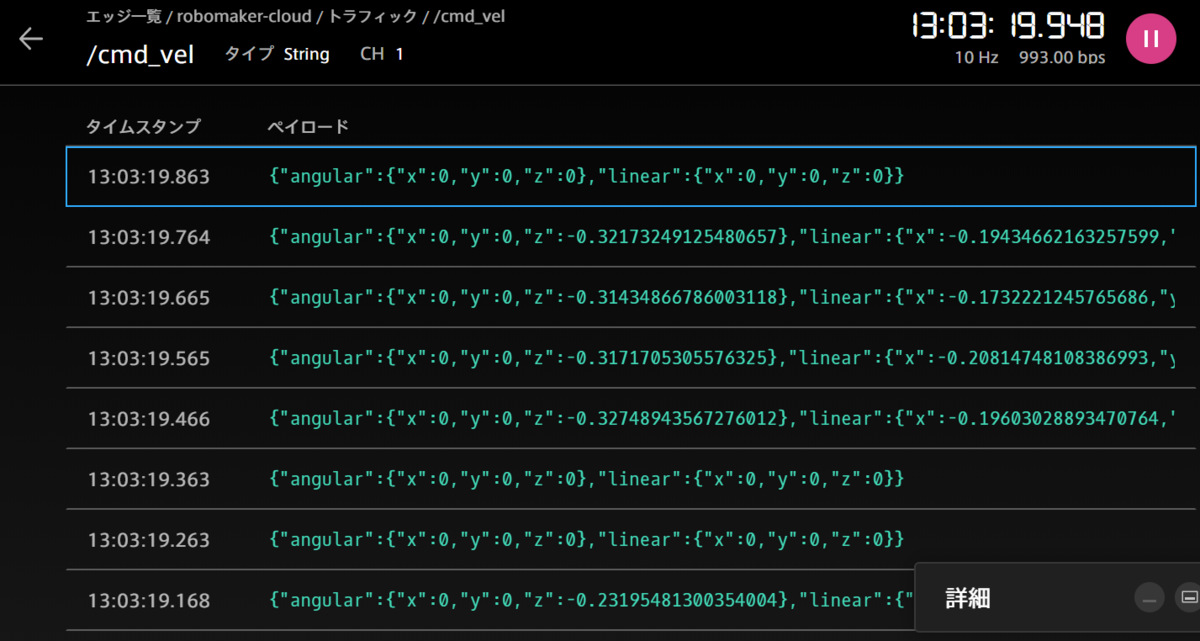
ここから、Turtlebot3の実機からROSトピックを流すために必要な帯域は、約140kbps、実機を制御するのに必要なROSトピックを流すために必要な帯域は約1kbps であることがわかりました。
上り・下りの帯域としては、現実的に利用可能な値ではないかと思います。
ただし、これらの帯域の値はTurtlebot3を使用した時の値であり、必要となる帯域は実際に使用するロボットの設定・構成に依存するので注意が必要です。
②AWS RoboMaker上でSLAM/Navigationを動かす。
AWS RoboMakerでは、Gazeboを使ったシミュレーションだけではなく、ROS bag 再生によるシミュレーションを行うことが可能です。
今回の取り組みでは実機を使うので、Gazeboは不要です。ROS bag再生用のシミュレーションアプリケーションを作成し、利用します。
具体的なやり方について説明します。
ROS bag再生に対応したシミュレーションアプリケーションを作る
AWS RoboMakerのコンソールから、「シミュレーションアプリケーション」→「シミュレーションアプリケーションの作成」を選択します。

シミュレーションソフトウェアスイートは「RosbagPlay」を選択します。このように設定することで、ROS bag再生用のシミュレーションアプリケーションを作ることが出来ます。
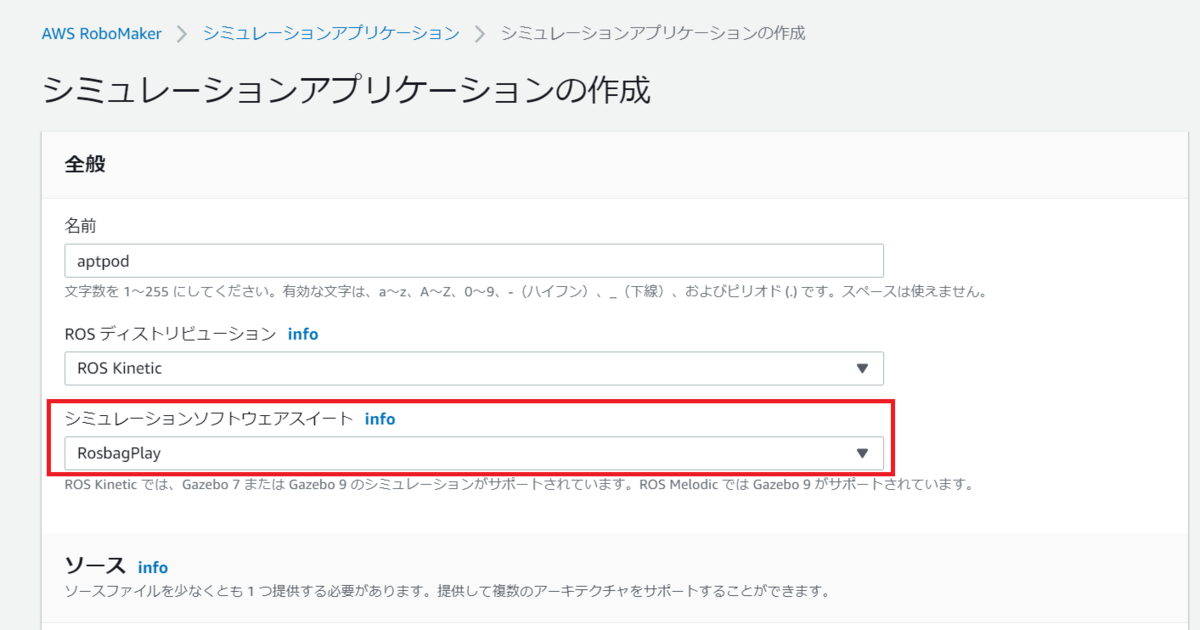
後ほどシミュレーションジョブを作成するときに使うので、アプリケーションに名前を付けます。ここでは「aptpod」という名前を付けました。
ROS bag再生用のシミュレーションジョブの作成
AWS RoboMakerのコンソールから、「シミュレーションジョブ」→「シミュレーションジョブの作成」を選択します。

今回は、ステップ2の「ロボットアプリケーションの指定」では「なし」を選択します。

ステップ3の「シミュレーションアプリケーションの指定」では、まず先ほど作成した既存のアプリケーションを選びます。

次に「データソースの設定」を行います。
コンソールから設定するときは、シミュレーションジョブを起動するために少なくとも一つのROS bagファイルを設定する必要があります。 ROS bagファイルはS3上にあるものを指定します。
AWS RoboMakerではlaunchファイルにROS bagを再生する設定を書くか、ターミナル上でROS bagファイルを再生しない限りは再生されないため、ここで設定したROS bagファイルは実際には再生されません。

これらの設定を終えたらシミュレーションジョブの作成を完了し、シミュレーションジョブが起動するのを待ちます。
シミュレーションジョブが起動すると、以下のような画面になります。
ここで、Terminalを選択するとターミナルが開かれます。あとは冒頭の動画で紹介したようにSLAMやNavigationなどのROSノードを起動するとrvizが使えるようになります。

まとめ
今回は「Turtlebot3の実機を使ったSLAMとNavigationをAWS RoboMaker上でやってみた」 について紹介しました。
研究開発グループではROSやAWS RoboMakerに関連した取り組みに限らず、プロトコルや機械学習に関連したテーマなど、様々な技術テーマの調査・検証を進めています。 今後も継続的に調査・検証の結果を記事として投稿できれば良いと思います。
最後までご覧いただきありがとうございました。