
はじめに
こんにちは、aptpod Advent Calendar 2020 の21日目を担当するハードウェアグループのおおひらです。
もう今年の稼働日もあと数日になりましたね。 例年、年末年始のお休みにむけて帰省や旅行を計画される時期と思いますが、今年はコロナウイルスの感染拡大もあって自宅でお過ごしになる方も多いと思います。本文に入る前のアイスブレイクとしてNetflixの最近のお勧めをひとつご紹介します。
『スタートアップ×少女漫画』とでも言えばいいのか(いや、どちらかというと優先度的に並びが逆で『少女漫画×スタートアップ』か…?)、私は韓国ドラマを観るのは初めてなんですが、コテコテな人情・恋愛要素を入れながらもスタートアップ/ベンチャーでよく聞く話がひとしきり押さえられていて面白いです。男性諸氏におかれましては夜中にお酒を飲みながらひとりで観ることをお勧めします(既婚の身で妻と一緒に観るのはすごく恥ずかしいぞ😇)
閑話休題。
さて、本記事では日置電機株式会社様の製品である【非接触CANセンサー SP7001】を、弊社の自動車計測のためのパッケージソリューション Automotive Proと組合わせて評価した結果を紹介させていただきます。なお本記事はハードウェアグループおよびソリューションアーキテクトの複数メンバー*1のコラボレーション記事です。
非接触CANセンサーの説明
日置電機株式会社様からご提供いただいた非接触CANセンサーの詳細に関しては上記の製品HPをご確認ください。簡単に特徴を述べさせていただくと以下の通りです。
- ハーネスに特別な加工や改造をしなくても被覆ごと挟むことでCAN信号を計測できるため、試作車両や市販車に対する計測の工数削減が可能
- CAN/CAN-FDバスに対して電気的な影響を与えず信号品質劣化のリスクが低いため、公道でのテストと計測における安全性の確保につながる
- CANの極性検知は自動検知もOK
- プロービングした信号がそのままD-Sub 9ピンのコネクタから出力されるので、他社製の既成CANロガーを利用してデータ計測が可能
通常、車両内部の制御信号はゲートウェイECUがあるために一般ユーザーは直接アクセスできません。弊社の過去の記事でも、Raspberry Piを利用してOBDⅡポートから車両の情報を取得する試みが掲載されましたが、こういった整備端子を経由する通信はリクエスト&レスポンスのやりとりによって得られるものであり、リアルタイム性やサンプリング周期の観点で車両本体の制御情報とは隔たりがあります。
そこで非接触CANセンサーの出番というわけですね。
特に近年、CASEと呼ばれる技術革新のトレンドに伴って完成車メーカー様以外の企業様でも車両の制御信号を計測したいというニーズが高まっており、弊社としても高い関心を持って試用をさせていただきました。
以下に弊社の計測システムを利用して、非接触CANセンサーから得られた計測データのリアルタイム性や一致性を検証した結果をご紹介させていただきます。
検証車両への機器設置
Automotive Proの紹介
Automotive Proは弊社が自動車の開発に携わるお客様向けに販売しているパッケージソリューションです。LTE通信機能とGNSS測位機能を持つ車載コンピューターに弊社のソフトウェア一式をインストールし、サーバー環境も含めて構築した状態でご提供*2しますので、お客様は面倒な設定作業なく即日車両計測を開始することが可能です。ハードウェアとしては前述の車載コンピューター、車室外を撮影するカメラ、およびCAN-USBインターフェースを利用して、動画とCANバスの制御信号を統合した時系列で計測することができます。さらにお客様のご要望にあわせてiPhoneアプリを利用した計測も実現可能です(intdash Motion 2.0のニュースリリース参照)。

今回はこのCAN-USBインターフェースに日置電機様の非接触CANセンサーの出力を接続しました。
計測システムへの非接触CANセンサーの追加
計測システムの模式図を下に示します。

弊社が普段の開発業務やお客様へのデモに利用している社有車は特別に車両のCANバスが取り出せるようにハーネスが改修されており、ここから得られる3系統のCANバス(図中のA,B,C)を2つのCAN-USBインターフェースで取得します。1つのCAN-USBインターフェースにつき2チャンネルのCANバスが取得可能ですので、余ったチャンネル1つに非接触CANセンサーの出力を接続し、通常のハーネス経由で計測したCANバスとのデータの差分を確認します。なお、弊社自社設計のCAN-USBインターフェースは複数の機器間で時刻同期をするためのクロック共有機能があり、各チャンネルの計測時刻を10マイクロ秒の精度*3で打刻することができます。
実車の写真は以下の通りです。非接触CANセンサーの電源は車両のシガーソケットから給電し、CANバスの入力極性モード設定は "FIXED"にしました。





物理的な接続が完了したら、続いてエッジ側の機器群(ターミナルシステム)の設定を行います。本稿では詳細を割愛させていただきますが、Linux OSで動作するintdash Edgeというミドルウェアに対して、GUIでCANバスのチャンネル追加やサンプリングレートの設定変更が可能です。
設定変更したらエンジンを始動してひとっ走りしてきましょう。車両のイグニッション信号に連動してターミナルシステムが自動的に計測を開始してサーバーにデータを送信します。弊社のIoTプラットフォームであるintdashはデータの完全回収が優れたポイントで、仮にネットワーク伝送路においてデータの欠損(LTEの通信環境悪化は分かりやすい一因)が生じても、ローカルストレージに一時保存されたデータが適切なタイミングで再送されることで時系列が保証されたデータをサーバーに完全回収することが可能です。
計測データの可視化
サーバーに保存されたバイナリデータの可視化にはWebブラウザで動作するVisual M2M Data Visualizerを利用します。 制御データのバイナリファイルを物理値に変換するためのDBCファイルをインポートし、可視化したい物理値を適切なビジュアルパーツに紐付けて配置することができます。
Visual M2M Data Visualizer
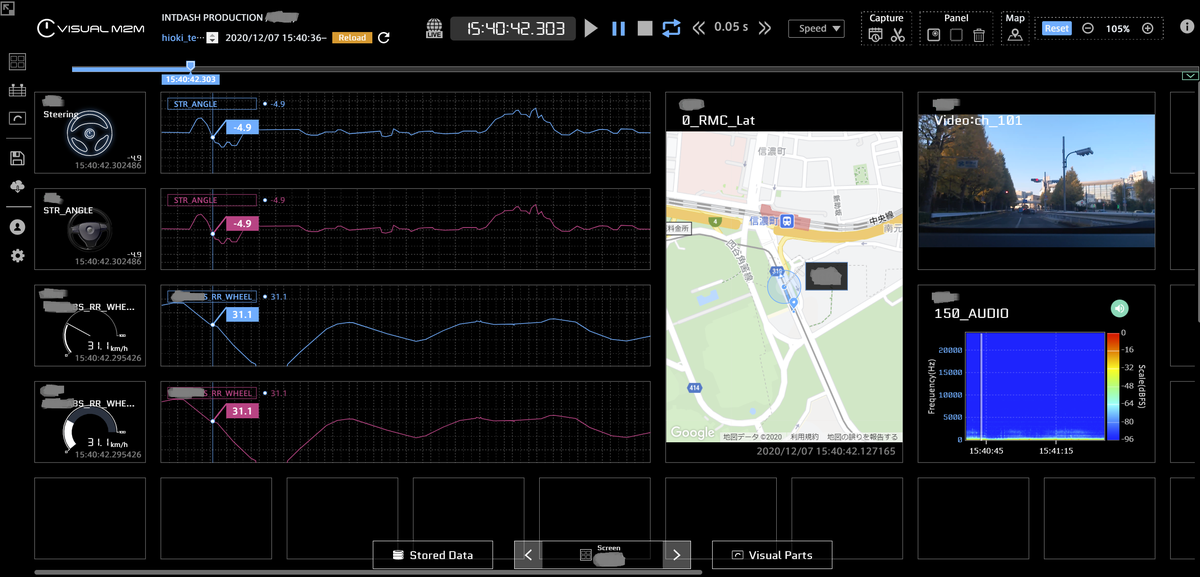
画面上の青色のグラフが車両のCANバスをハーネス経由で直接計測した情報で、赤色のグラフは非接触CANセンサー経由で計測した情報を時系列に沿って可視化しています。CANバスを流れるステアリングの操舵角および車両の速度の情報と、同時にGNSSから得られる車両の座標、前方視界を撮影するビデオカメラの動画、車室内のマイク音声もビジュアルパーツとして配置しています。直感的に理解しやすいですね。
さて青色と赤色の計測データはそれぞれ同じように見えますが、詳細はどうでしょうか?更に踏み込んで精緻な検証をしたい場合、計測データをCSVファイルでダウンロードすることができます。
CSVダウンロード
ダウンロードしたCSVファイルにはTimestampの情報(マイクロ秒)と選択したデータが含まれます。今回は簡易的にMicrosoftのExcelを利用してCSVファイルを確認してみました*4。

ハーネスから計測した速度データと非接触CANセンサーから計測した速度データを比較してみると、10マイクロ秒オーダーまで時刻が一致するデータが約82%存在し、時刻が一致しないデータに関しても20マイクロ秒の範囲内に同一のデータが存在することが分かりました*5。
弊社のCAN-USBインターフェースの打刻誤差が10マイクロ秒であることを考慮すると、非接触CANセンサーの遅延は十分に小さいと言えます。
なお答え合わせ的にネタばらしすると、こちらで謳われている性能として、
非接触方式でも信号を取りこぼさず、接触方式と同様に正確なCAN信号の取得が可能です。また、CAN信号検出における遅延が130nsと非常に小さく、リアルタイム性を失いません。
というスペックが保証されていますので、安心して利用できることが分かります。
おわりに
本記事では日置電機株式会社様からご提供いただいた非接触CANセンサーを、アプトポッドが提供する自動車計測ソリューションであるAutomotive Proと組合わせて利用し、車両の制御信号を可視化するユースケースをご紹介させていただきました。
CANバスのハーネス経由で直接得られるデータを基準に非接触CANセンサーを評価した結果、低遅延でデータの取りこぼしが発生せず、通常のCAN計測と全く遜色なく利用できることが分かりました。
自動車の研究開発に携わっている方々をはじめとして、移動体全般のデータ計測にご興味・ご関心をお持ちの方はぜひ弊社HPの問合せフォームからご連絡をいただけますと有難く思います。
最後になりますが、今回製品の試用と本ブログでの情報発信にご快諾いただいた日置電機株式会社の新津様、高橋様、柳澤様、誠にありがとうございました。この場を借りて厚く御礼申し上げます。