
aptpod Advent Calendar 2022の15日目を担当します、ソリューションアーキテクトの岩坪です。
今回の記事では当社が2022年12月にベータリリースしました、モビリティ・ロボットのフリート管理や遠隔監視、遠隔制御を実現するための管制制御システム向けのソリューションフレームワークである「intdash CONTROL CENTER」を紹介させて頂きます。intdash CONTROL CENTERを利用すると 低コスト・短期で、データ利活用が可能な、拡張性のあるシステム を構築することができます。
記事の後半にはintdash CONTROL CENTERを利用した管制制御システムを想定したユースケースのデモ動画も載せていますので、「何はともあれまずはどういうことができるの」という方は先にデモ動画を見てみて下さい。
- はじめに
- intdash CONTROL CENTER とは何?
- intdashを利用したデータ伝送プラットフォームの特長
- intdash CONTROL CENTERで実現できること
- intdash CONTROL CENTERを使ったデモ紹介
- おわりに
はじめに
aptpodのソリューションアーキテクトという役割は、お客様のデータ収集やデータ利活用における課題解決や、お客様業務のDX(デジタルトランスフォーメーション)実現に向けて、当社コアプロダクトであるIoTデータ伝送プラットフォーム intdash をベースにソリューション提案を行い、お客様と共にプロジェクトを推進、発展させていくことをミッションとしています。
ソリューションアーキテクトってどんな仕事? - aptpod Tech Blog
ここ数年は、様々なモビリティ・ロボット向けにintdashを活用頂き、 建設機械・重機・農機、配送ロボットや警備ロボットといったサービスロボット、工場や物流倉庫内のAGV(Automatic Guided Vehicle)・AMR(Autonomous Mobile Robot)等において、 遠隔監視、遠隔制御、フリート管理を実現したいお客様も増えてきています。 そういった背景もあり、aptpodは様々なモビリティ・ロボットにおける遠隔監視・遠隔管理/フリート管理・遠隔制御向けのプロダクト企画、開発を進めており、 この度、2022年12月に管制制御システム向けのソリューションフレームワーク「intdash CONTROL CENTER」をベータリリースすることができました。
intdash CONTROL CENTER とは何?

今回紹介するintdash CONTROL CENTERは、モビリティやロボット向けのリアルタイムかつインタラクティブな管制制御システムを迅速に構築できるようにするための、ソリューションフレームワークです。 本ソリューションを活用頂くことで、ロボットや自動車、建機・重機といった複数のモビリティを対象に、遠隔からモビリティ群を監視・管理することができ、必要に応じて人の手による遠隔指示・操作の介入を行うことができるようになります。
こういった管制制御システムを構築し、運用していく為には、そこに至るまでに要件定義や機能開発、検証(PoC)のために多大な開発コスト、期間が必要になるため、システムを導入したいと考えていても、なかなか立ち上げに進められない方々が多いのが現実です。導入検討の初期段階からいきなり本番運用を見据えた全ての要件定義や運用方法を定めるということも現実的ではないため、小さなPoCのフェーズからはじめて徐々に要件を定めつつ、開発、検証のサイクルを回していく必要もあります。 intdash CONTROL CENTERはまさにこういった「管制制御システムを作っていきたいが、何からどう手を付けてよいのか、いきなり膨大な予算を取るのは難しい…。」と考えられている方にも適したソリューションです。本ソリューションの、データ収集・データ保存・データ管理・データ可視化、といった基本機能をまずは活用頂くことで短期・低コストで初期フェーズのシステム構築を実現します。検証を繰り返す中で、必要となった機能はあとから拡張開発することも可能なので、段階的に運用に向けたシステム構築を進めることができます。
intdash CONTROL CENTERの適用シナリオとしては、下記のようなものがあげられます。
- 工場や物流倉庫におけるAGVの運用監視・遠隔制御介入
- 建設現場における建設機械の運用監視・遠隔指示
- スマートシティにおける自動運転モビリティの運用監視・遠隔指示

intdash CONTROL CENTERを利用頂くことで、個別開発の要素を減らし、ベースとなる機能の検証も減らすことができるので、お客様の実現したいことに対して、お客様自身が注力すべき領域のみに集中してシステム構築を進めることができるようになります。
intdashを利用したデータ伝送プラットフォームの特長
intdash CONTROL CENTERの説明の前に、まずは本ソリューションのベースとなる、当社のコアプロダクト intdash に関して概要を説明します。 intdashに関する詳細は、下記を参照下さい。

intdashでは自動車やロボット・産業機械や制御・可視化アプリケーションなど、短期間に大量のデータを発生させるデバイスをモバイル網やインターネット網を経由して相互にライブ接続することができます。intdashを流れるストリーミングデータはそのまま時系列データストアに保存され、Visual M2Mでの可視化やAnalytics Servicesでの計算処理や機械学習に利用することができます。
各種デバイスからのリアルタイムなデータ伝送と、時系列データとして様々なデータをサーバへ保存し、可視化をするといったデータ伝送プラットフォームの実現のために、当社からは以下のミドルウェアおよびアプリケーションを提供します。
- サーバサイドミドルウェア:intdash Server
- エッジサイドミドルウェア:intdash Edge
- 時系列データの可視化アプリケーション:Visual M2M Data Visualizer
- 管理ユーティリティ:Edge Admin Console、Edge Finder、Meas Hub
intdashを利用頂くことで、下記の特長を持つIoTデータ伝送プラットフォームを構築することができます。
- 短期間に大量のデータが発生するような高頻度のデータを扱うことができる
- 高いリアルタイム性でデータ伝送ができる
- 伝送時にパケロスしたデータの完全回収ができる
- 多種多様なデータに対して時刻を同期してデータ管理が行える
- サーバに保存されたデータを後から利活用できる
上記の通り、intdashはクラウドなどのサーバに構築したintdash Serverにモビリティのデータをリアルタイムに保存し、データを管理・活用することができるものです。モビリティの機体やデータを管理するための、管制制御システムのようなモビリティ管理プラットフォームをサーバをハブとしたデータ伝送システムとして構築するのが望ましい理由としては、いくつかあげられます。
- 管理対象のモビリティに問題が発生した際に、問題発生時のモビリティのデータをエビデンスとしてあとから確認したい(過去データの再生)
- 管理対象のモビリティのデータは様々な拠点から、複数の利用者が確認したい(複数拠点からのアクセス)
- 収集したモビリティのデータをただ貯めておく、可視化するだけでなく、データを利活用してDXを推進したい(データの利活用)
こういったニーズがある場合は、限定された拠点や環境においてのみ利用可能なデータとして管理するのではなく、intdashのようにクラウドなどのサーバをハブとしたシステムとして、モビリティのデータを伝送し、保存、管理する必要が出てきます。intdashを利用頂くことで、これらのニーズに応える管制制御システムの構築が可能となり、これが本記事で紹介するintdash CONTROL CENTERで構築したシステムの特長にもなります。
intdash CONTROL CENTERで実現できること
改めて説明すると、intdash CONTROL CENTERはモビリティやロボットのリアルタイムかつインタラクティブな管制制御システムを迅速に構築できるようにするための、ソリューションフレームワークです。 intdash CONTROL CENTERは下記のコンポーネントで構成されます。
- モビリティの機体データの送受信処理を行うエッジ側のソフトウェア
- データストリーミング中継処理やデータ保存を行うサーバ側のソフトウェア
- リアルタイムな群管理や個別機体の状態モニタを行えるWEBアプリケーション

それぞれのソフトウェアコンポーネントを活用することで実現できるintdash CONTROL CENTERの機能と特長について説明します。
(1)リアルタイムなフリートマップマッピング
複数モビリティの位置情報や、モビリティに搭載されたカメラの映像などのデータをマップマッピングして可視化できる、WEBベースの統合監視環境をリファレンスアプリケーションとして提供します。 本アプリケーションを利用することで、離れたところから現場で稼働する複数のモビリティの稼働位置、稼働状況を確認することができます。
本アプリケーションは、以下のような開発に活用頂くことができます。
- 屋内シナリオにおける対象となるエリアのマップなどを画像データとして背景に表示したUI開発
- 屋外シナリオにおけるOpenStreetMapやGoogle Mapsなどを利用したUI開発
- モビリティ個別やモビリティ群全体に対するコマンド送信による遠隔指示機能の実装

(2)モビリティの様々なリアルタイムデータを確認可能なダッシュボード
モビリティの詳細データをリアルタイムにダッシュボードに表示して確認することができます。 制御データや映像データなど様々なデータをリアルタイムに表示することが可能であり、ノンプログラミングでユーザによる自由なダッシュボードの構成変更が可能です。
モビリティ毎の状態(ステータス)、速度、稼働率などの稼働状況や、バッテリー稼働のモビリティのSoC(State Of Charge)やSoH(State of Health)など、モビリティ管理に必要な詳細なデータを遠隔から監視できるようになります。 ダッシュボード上のVisual Partsを変更することで、対象となるデータの値を表示するだけでなく、時間変化に伴う稼働率状況の変化などをグラフ表示することもできます。


(3)モビリティを遠隔操縦するためのコントローラ接続と操作データ伝送
ゲームコントローラなどの様々な操作デバイスを接続するためのエッジデバイス用のコンポーネントを提供します。本コンポーネントを利用頂くことで、エッジデバイスに接続されたコントローラの操作情報を操作対象であるモビリティへ遠隔からリアルタイムにデータ伝送し、リアルタイムな遠隔操作・操縦を実現します。
倉庫や工場内などのモビリティはAMRのような自律走行やAGVのような磁気テープ上を無人走行するケースが多いですが、予期しない障害物が置かれてしまうなどして動作不能となるケースがあります。その場合に、モビリティの異常状態(動作不能)を検知して、一時的に遠隔からの人の手による操縦を介して復帰可能な位置まで移動させるような場合に、遠隔操縦が活用できます。

(4)ロボット/モビリティ、センサーからカメラまで様々なデバイスの接続
ロボットや自動車などのモビリティ、またモビリティ上に搭載されるセンサーなどの様々なデバイスを接続して、モビリティのデータ収集するための、エッジデバイス用のコンポーネントを提供します。本コンポーネントは、エッジデバイス側のソフトウェアコンポーネントである「Device Connector」として提供します。
Device Connectorはターゲットとなるデータデバイス(モビリティ自体、センサー、カメラなど)からデータを取得して、intdash Serverにデータ送信を行う「intdash Edge Agent」にデータを受け渡す機能を持ちます。 Device Connectorを利用することで、下記のような様々な形式のデータをフュージョンストリーミングでintdash Serverへ送信することが可能です。
- ロボットにおけるROS1/ROS2のメッセージ
- モビリティにおけるCAN(Control Area Network)
- 汎用センサー、ビデオなどのセンサーデバイス

(5)データの収集・保存と利活用
モビリティから収集されたすべてのデータはサーバに永続化されるため、運用時のデータは過去データを再生することで当時の状況を詳細まで確認することが可能です。 これにより、異常発生時には、関係者によるデータレビューもすぐに行うことができます。これは国内外など関係者が様々な拠点にいる場合でも同様で、同じデータに各拠点からアクセスしてデータ内容を確認することができます。
また、サーバに保存されたデータを活用することで、詳細なデータ解析フローを実現することもできます。運用時に複数のモビリティのデータを都度、人の手により確認して、解析することは現実的ではないので自動化された解析フローを構築することで、効率的な管制制御システムの運用を行うことができます。
(6)豊富なSDK・APIを利用した拡張開発
intdash CONTROL CENTERでは、用意されたSDK、APIを利用することでリアルタイムデータ処理アプリケーションの開発が可能です。お客様ごとの、利用されるモビリティや、運用シーンに合わせて下記のような拡張開発を行うことができます。
- アラート機能
- 詳細データを活用した異常検知
- リアルタイム分析による異常検知
- AIを利用したリアルタイム映像分析
- モビリティ個別の稼働率計算
SDKなど拡張開発に必要となる情報は下記リンクにも置いてありますので、ご興味ある方は参照下さい。
intdash CONTROL CENTERは上記の機能を実現するソフトウェアコンポーネントを提供します。これをベースにユースケースに応じた、拡張性を持ったシステム開発が可能になります。
前述の通り、ゼロから開発を進めると費用、期間ともに大きく掛かってしまう、モビリティ/ロボット向けの管制制御システム、遠隔操縦システムですが、本ソリューションを導入し、全ての機能または一部の機能を活用頂くことで、低コスト、短期での本番運用に向けたシステム構築ができるようになります。 上記にあげた機能のいずれかの実現を目ざしている、または、上記のような機能実現に課題があるといったお客様は是非、当社へご連絡頂き、intdash CONTROL CENTERの活用について一緒に検討させて下さい。
intdash CONTROL CENTERを使ったデモ紹介
これまで説明してきたintdash CONTROL CENTERを利用した、2つのユースケースにおけるデモを紹介します。1つ目は自律走行ロボット群のフリート管理、2つ目は移動ロボットの遠隔操縦・コマンド指示のユースケースです。
(1)自動走行ロボット群のフリート管理
ROS(Robot Operation System)のシミュレータであるGazebo上で、屋内工場内に6台の自動走行ロボットを稼働させています。ロボット内はROS1で構築しています。 それぞれのロボットにはintdash Serverとデータ送受信を行うための、intdash EdgeとDevice Connectorを搭載しており、各機体の位置情報、カメラ映像などをリアルタイムにintdash Serverに送信しています。
intdash Serverに送信された位置情報をもとに、intdash CONTROL CENTERのリファレンスアプリケーションであるフリートマップアプリケーションを使用して、各機体の位置や状態、カメラ映像をリアルタイムに可視化することができます。 各ロボットの詳細なデータを確認したい場合には、フリートマップアプリケーションからVisual M2M Data Visualizerに遷移して、機体データの詳細をダッシュボード上で確認することができます。
今回のデモではVisual M2M Data Visualizerで、各ロボットのSoC, SoHや稼働率をダッシュボード上に値表示、グラフ表示を行っています。 本デモのように遠隔監視室から、稼働しているロボットのマップ上の位置や、SoC/SoH、稼働率といった稼働状況を監視することで、管理対象のロボットが安全かつ効率的な作業が実施できているかを確認することができます。

【動画説明】
3:30頃まではフリートマップアプリケーション上に複数のロボットの位置情報を表示しています。画面下部には選択しているロボットの名称や状態、カメラ映像を表示しています。
3:30頃からVisual M2M Data Visualizerで6台のロボットそれぞれの詳細データをダッシュボード上に表示しています。速度、角速度、SoC/SoH、稼働率などを値で表示しています。
4:30頃からは同じくVisual M2M Data Vizualizerで6台のロボットのSoCや稼働率の推移をダッシュボード上でグラフ表示しています。
本動画では同じディスプレイでそれぞれのアプリケーションを順番に表示していますが、実際の遠隔監視室では複数のディスプレイを配置して、それぞれのアプリケーションを並べて同時に確認することもできます。
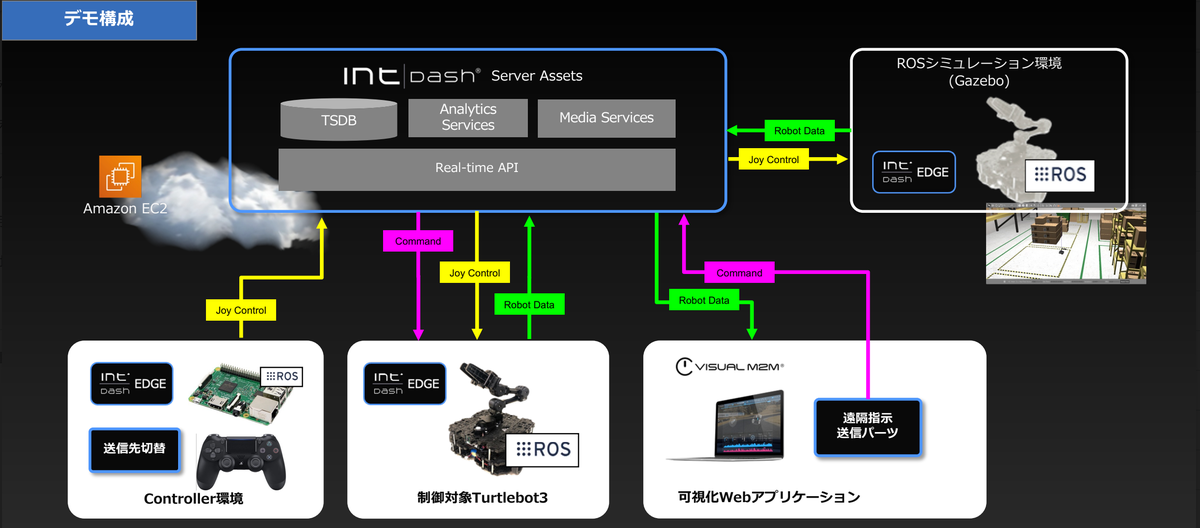
(2)移動ロボットの遠隔操縦・コマンド指示
オープンソースの移動ロボットプラットフォームである「Turtlebot3」(実機のロボット)とGazebo上のロボット(シミュレータ上のロボット)を使用した遠隔操縦のデモです。 制御対象のロボット(Turtlebot3)はROS1で構築しており、ロボットに搭載したRaspberry Piにintdash Severとデータ送受信するためのintdash EdgeとDevice Connectorを搭載しています。 同じく、Gazebo上のロボットにもintdash EdgeとDevice Connectorを搭載しています。
遠隔操縦用のコントローラとしては「DualSense」を使用しています。操作情報をintdash Serverに送信するために、Raspberry Piを用意し、intdash EdgeとDevice Connectorを搭載しています。DualSenseとRaspberry PiはBluetoothで接続して、コントローラのボタン、ジョイスティックの情報をリアルタイムにRaspberry Pi上のintdash Edgeを介して、intdash Serverに送信します。 intdash Serverに送信された操作情報は、ロボット上のRaspberry Piが受信して、操作情報に従い、ロボットの車輪やアームを動作させます。
本デモの構成では、ロボットに搭載されたカメラ、センサ情報をリアルタイムにVisual M2M Data Visualizerで監視を行いながら、必要な場合には、人の手を介して遠隔操縦を行うことが可能となります。 また、Visual M2M Data Visualizer上のボタンを操作することで、ロボットに対するコマンド送信を行うこともできるので、遠隔監視室からロボットへ指示を行うことが可能です。
【動画説明】
0:30頃までは、画面右下に表示されているカメラ映像のDualSenseを操作して、Gazebo上のロボットを遠隔操縦しています。Gazebo上のロボットの動きは画面左下のGazebo上のカメラ映像と、LiDAR情報から確認できます。
0:40頃に掛けて、遠隔操縦の制御対象をGazebo上のロボットから、Turtlebot3に切り替えています。
1:15頃までは、DualSenseを操作して、Turtlebot3を遠隔操縦しています。Turtlebot3の動きは、画面右下のカメラ映像と、画面左上のTurtlebot3に搭載したカメラの映像、LiDAR情報から確認できます。
1:25頃からは、Visual M2M Data Visualizer上の、画面右上の青いボタンを押すことで、Turtlebot3に「アーム位置をリセットする」コマンドを送信しています。青いボタンを押すと、画面右下のTurtlebot3のアーム位置が初期位置に移動する様子が確認できます。
おわりに
今回は当社が提供する、モビリティやロボットのリアルタイムかつインタラクティブな管制制御システムを迅速に構築するためのソリューションフレームワークである「intdash CONTROL CENTER」を紹介させて頂きました。 intdash CONTROL CENTERを導入して管制制御システムを構築することで、下記の特長を持つシステムが実現できます。
- 低コスト、短期でシステムを構築
- 拡張性のあるシステムを実現
- クラウドに保存されたデータを利活用可能
ロボット管制・管理、遠隔操縦、フリート管理などに課題をお持ちの方は、是非当社にご連絡下さい。 intdash CONTROL CENTERを活用頂くことで、課題解決を行い、本番運用に向けた管制制御システムを迅速に実現できるようお手伝いできればと思います。
また、当社ではロボティクス分野向けのソリューションの他にも、自動車分野向けのパッケージプロダクトも開発を進めています。
【intdash AUTOMOTIVE PRO REMOTE CAL】ECU遠隔適合システムのご紹介 - aptpod Tech Blog
intdash CONTROL CENTER、intdash AUTOMOTIVE PRO REMOTE CALともにパイロットユーザーを募集中です!
aptpodは今後も、各産業のDXを進めるためのプロダクトを企画、開発を進めていきます。intdash及び、当社プロダクトで解決できる課題があれば、是非、お気軽に下記リンクからご連絡下さい。